











Mesin Mengait Rata Atas Kasut Berkelajuan Tinggi
Model:SF3-52S
Jenis Mesin Mengait Rata Atas Kasut Berkelajuan Tinggi ialah gerabak tunggal dengan sistem tiga kali ganda. Pengangkutan ultra-kecil bermotor penuh 5.2-inci, cam pemindahan bermotor, pengembalian pantas, pengangkutan tidak menunggu apabila jarum pemindahan, mengurangkan laluan dan laluan pengangkutan dengan berkesan, meningkatkan kestabilan dan kecekapan mesin dengan sangat baik. Jahitan dua peringkat baharu, tanpa menambah bilangan motor, merealisasikan kawalan bebas jahitan utama dan tambahan. Berbanding dengan jahitan dinamik, Mesin Mengait Rata Atas Kasut Berkelajuan Tinggi boleh mencapai 1 perubahan jahitan jarum dan julat ketumpatan yang lebih luas, supaya dapat memenuhi keperluan yang lebih tinggi daripada pelanggan yang berbeza untuk fabrik. Fungsi tuck ketat boleh laras boleh memenuhi kepadatan tuck ketat dan kawalan ketat vamp, dan meningkatkan perasaan tiga dimensi vamp. The Sinkers boleh diseberang, ia boleh merealisasikan fungsi mula mengait tanpa sisa benang dan menjimatkan kos benang; Apabila ia digunakan bersama dengan peranti benang penekan, ia boleh mengisi vamp dengan lebih penuh dan lebih tebal.



| Tolok | 14G |
| Lebar | 36 Inci / 52 Inci / 72 Inci |
| Sistem mengait | Pengangkutan tunggal dengan sistem berganda / tiga sistem |
| Kelajuan mengait | Kelajuan maksimum 1.6 m / saat |
| Memeras | Pemacu motor, rak maksimum dalam 2 inci |
| Penggerak Needlle | 8 bahagian penggerak jarum elektronik |
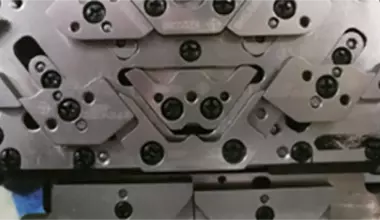
| Sistem sinker | Sistem benam dengan hak harta intelek bebas dikawal oleh 6 motor melangkah, tekanan tenggelam yang berbeza digunakan berdasarkan kaedah mengait fabrik yang berbeza untuk sistem yang berbeza, mencapai pelbagai bentuk dan penambahan. |
| Perlindungan | Peranti berhenti automatik jika benang patah, simpulan benang, menyusun, menarik, siap, beban berlebihan, permulaan dan berhenti yang ditetapkan, ralat program |
| Peranti ke hadapan benang | Penyumpan keladi dan peranti penyimpanan benang (pilihan), kawalan ketegangan benang yang tepat, untuk memastikan kualiti kualiti keseluruhan fabrik |
| Peranti keselamatan | Seluruh penutup mesin untuk mengurangkan bunyi dan habuk, Penutup pelindung dilengkapi dengan sensor berhenti, berhenti kecemasan, peranti mematikan |
| Peranti penggelek | Roller pesanan tinggi, pelarasan subseksyen |
| Rod penyambung motor | Didorong oleh rod penyambung motor, membalikkan dengan lebih tepat |
| Tuck ketat | Segitiga gantung ketat dikawal oleh motor, untuk mencapai darjah gantung ketat yang berbeza |
| Saiz dan berat | Saiz:LXWXH 2600X955X2010/2970X955×2010/3370×955×2010mm Berat:950/1145/1250kg |
| Kuasa | Voltan: AC 220V/380V Kekerapan: 50HZ/60HZ Kuasa: 1.5KW |
-
 Paparan skrin
Paparan skrinIa menggunakan pemapar LCD industri dengan kawalan sentuh grafik, pelbagai warna, Data jumlah mengait, masa, kelajuan, penggelek, ketumpatan, pembawa benang, dll. Boleh dipaparkan semasa bekerja.
-
 Penyimpanan Benang
Penyimpanan BenangPembekal benang positif boleh mengurangkan rintangan penyusuan benang dengan berkesan, terutamanya sesuai untuk bahagian atas anyaman benang anjal rendah berbilang helai, biarkan bahagian atas lebih licin, dan mesin kurang kehilangan jarum.
-
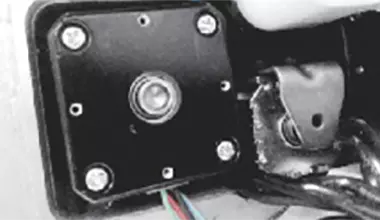
 Motor Servo
Motor ServoSistem mesin menggunakan pemacu servo kawalan komunikasi CAN, menyedari operasi berkelajuan tinggi gerabak mesin, pemulangan gerabak yang sangat cepat adalah stabil, dan kecekapan mengait gerabak bertambah baik sebanyak 2%.
-
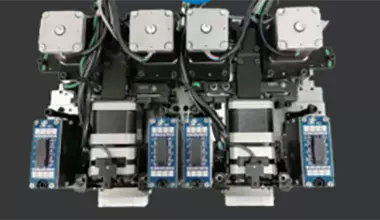
 Motor Jahit
Motor JahitDengan fungsi jahitan dinamik, menggunakan motor melangkah berkelajuan tinggi, fungsi jahitan berbilang segmen boleh dicapai dalam satu kursus.
-
 Bar Penyongsangan Bermotor
Bar Penyongsangan BermotorBar penyongsangan pemacu motor stepper, ia mengurangkan jarak pemulangan gerabak dan meningkatkan ketepatan dan kecekapan pemulangan gerabak.
-
 Tuck Ketat Boleh Laras
Tuck Ketat Boleh LarasFungsi tuck ketat boleh laras, mengikut keperluan sebenar untuk mencapai fungsi mengait ketat dan tuck ketat, mencerminkan gaya bahagian atasâ yang berbeza.
-
 Reka bentuk Pengangkutan Ultra-kecil
Reka bentuk Pengangkutan Ultra-kecilOptimumkan lagi saiz gerabak mesin, kurangkan jarak balik gerabak, dan tingkatkan kecekapan 5-8%.
-
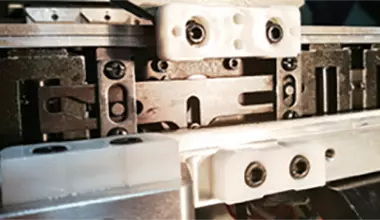
 Reka bentuk CAM Bermotor
Reka bentuk CAM BermotorPemacu motor digunakan dan bukannya elektromagnet untuk mengawal tindakan CAM dan pengesanan yang berkesan, yang boleh menua disebabkan mengelakkan melekat mekanikal. Kerosakan jarum disebabkan oleh lekatan mekanikal CAM.
-
 perhimpunan
perhimpunan -
 Pebugging
Pebugging -
 Pembungkusan
Pembungkusan -
 Pengangkutan
Pengangkutan












